Innovation für die RohstoffindustrieMappingboat: Nachhaltiger Sand- und Kiesabbau

Mit einem autonom fahrenden Boot Sedimentkarten erstellen und den Abbau von Sand und Kies nachhaltiger gestalten – das ist das Ziel des Mappingboats, das die THGA in Kooperation mit der Firma Carplounge Tackle entwickelt. Gefördert wird das Projekt durch das "Zentrale Innovationsprogramm Mittelstand" (ZIM) des Bundesministeriums für Wirtschaft und Energie, das unter anderem die Zusammenarbeit von Forschungseinrichtungen und Unternehmen zur Entwicklung innovativer Produkte unterstützt.
Abbauvolumen besser ausschöpfen
Carplounge Tackle ist auf die Produktion von High-End-Futterbooten für Anglerinnen und Angler spezialisiert. Diese ermöglichen es – inzwischen auch mit GPS und Echolot –, Köder in schwierige oder entlegene Gewässerbereiche zu bringen und so Fische anzulocken. Die THGA wiederum sieht einen Forschungsbedarf für die Kies- und Sandindustrie, da Lagerstätten häufig nicht vollständig genutzt werden: Rund 20 bis 25 Prozent des Abbauvolumens verbleiben ungenutzt am Grund von Baggerseen, schätzt THGA-Prof. Dr. Albert Daniels.
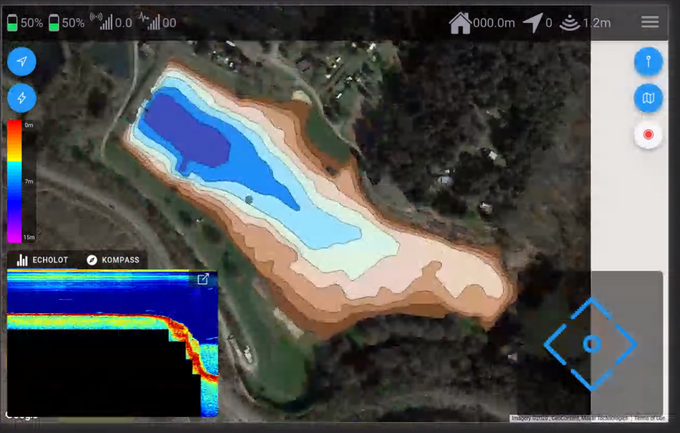
Bei der Entwicklung des Mappingboats kommen beide Seiten nun zusammen: Ein voll autonom fahrendes Boot, das zugleich Hindernisse erkennt und umfährt, ist ideal für die Anglerszene. Erweitert um modernste Vermessungstechnik kann die THGA diese Boote nutzen, um detaillierte und qualitativ hochwertige Informationen über den Untergrund von Lagerstätten zu generieren und die Nassgewinnung von Sand und Kies zu optimieren. Dass man mit speziellen Echolotsystemen den Untergrund von Baggerseen abtasten und anhand des Reflexionsverhaltens der Echolotsignale Untergrundstrukturen interpretieren kann, ist bereits bekannt. Unklar ist, wie das Messergebnis des Echolots und die Qualität des Untergrunds zusammenhängen. Das soll jetzt mit Feldversuchen und Probenahmen erforscht werden, um künftig neben der reinen Höhenlage – für die ein Echolot normalerweise eingesetzt wird – auch automatisch Qualitätsvermessungen durchzuführen.

Die gewonnenen Daten werden künftig noch an Bord verarbeitet und anschließend direkt in die Abbaukontrollanlagen der Schwimmbagger, die bei der Nassgewinnung von Sand und Kies zum Einsatz kommen, übertragen. Damit soll der Kies- und Sandindustrie ein vollständig autonom fahrendes Vermessungsboot zur Verfügung stehen, das ein Gewässer abbaubegleitend abfährt, Vermessungen durchführt und kostengünstig Informationen über Qualitätsmerkmale des Lagerstättengrunds generiert, durch deren Auswertung Abbauverluste minimiert werden. Carplounge Tackle hingegen kann ein neues Produkt in seinem Portfolio präsentieren, das sich aufgrund der automatisierten Steuerung mannigfaltig einsetzen lässt.
Um das Projekt voranzutreiben und mehr Know-how im Bereich Machine Learning zu erwerben, absolvierte Philip Ridder ein sechswöchiges Praktikum bei der Bundeswehr an der Wehrtechnischen Dienststelle für Schiffe und Marinewaffen, Maritime Technologie und Forschung in der Liegenschaft Kiel. Er kann die dort mit den Daten der Bundeswehr entwickelte "Datenpipeline" fast eins zu eins auf das Mappingboat-Projekt übertragen und so die Automatisierung des Projektes weiter vorantreiben.
Gefördert durch

Ansprechpartner
Prof. Dr.-Ing. Albert DanielsProfessor für Rohstoffgewinnung über und unter Tage
- Albert.Daniels[at]thga.de
- Telefon
- +49 234 968-3243
- Büro
- G2 R001
